~距離センサーの値の変化でお化けが現れる~
距離センサーに手を近づけると、画面上にお化けたちが現れ、音が鳴ります!
目次
このボタンをクリックすると、Processingを動かすために必要な画像や音楽ファイルがまとまったzipファイルをダウンロードできます。

ダウンロードしたzipファイルを展開し、中にある3つのデータファイルをprocessingフォルダにコピーします。
SchooMy_workspace\processing_with_SchooMy
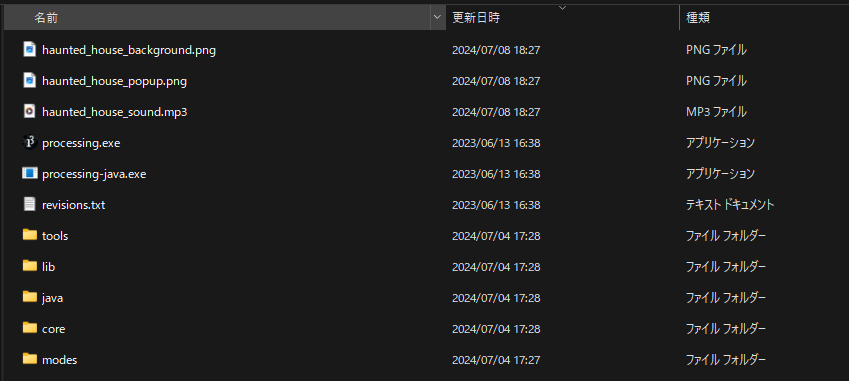
※画像と音を変更したい場合は、同じファイル名で置き換えてください。
左上:距離センサー
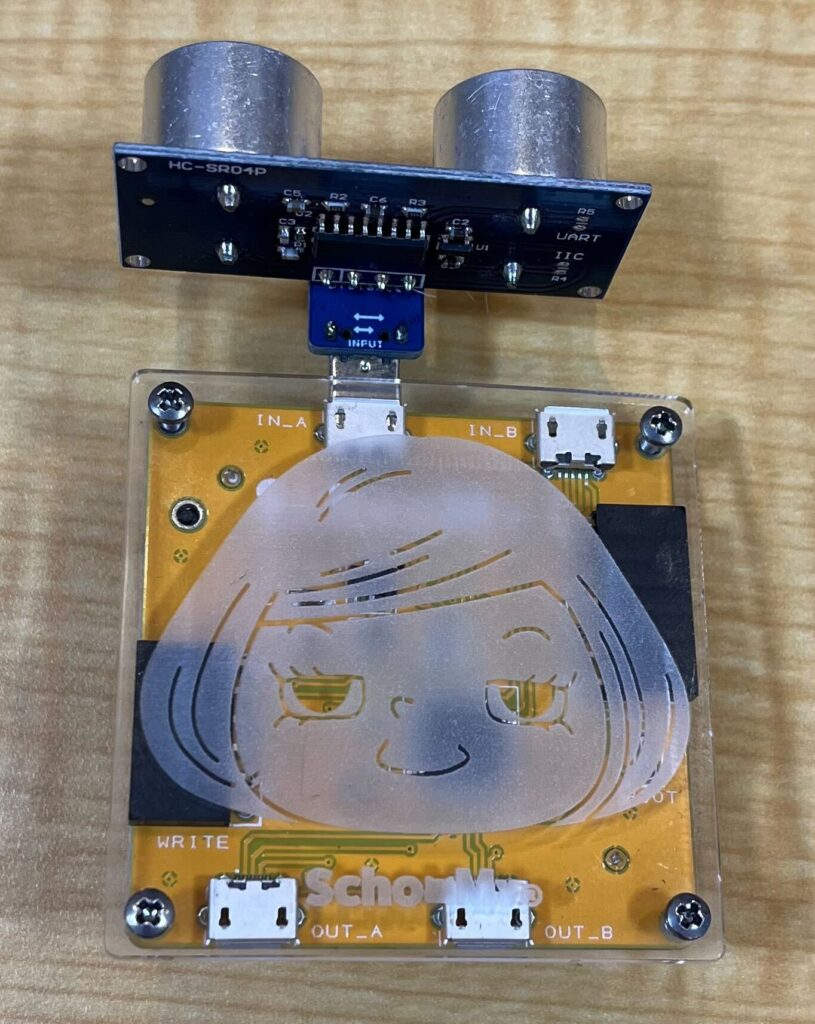
距離センサーを使用するため、スクーミーIDEのプログラムの9行目でsensorTypeを9にしてください。
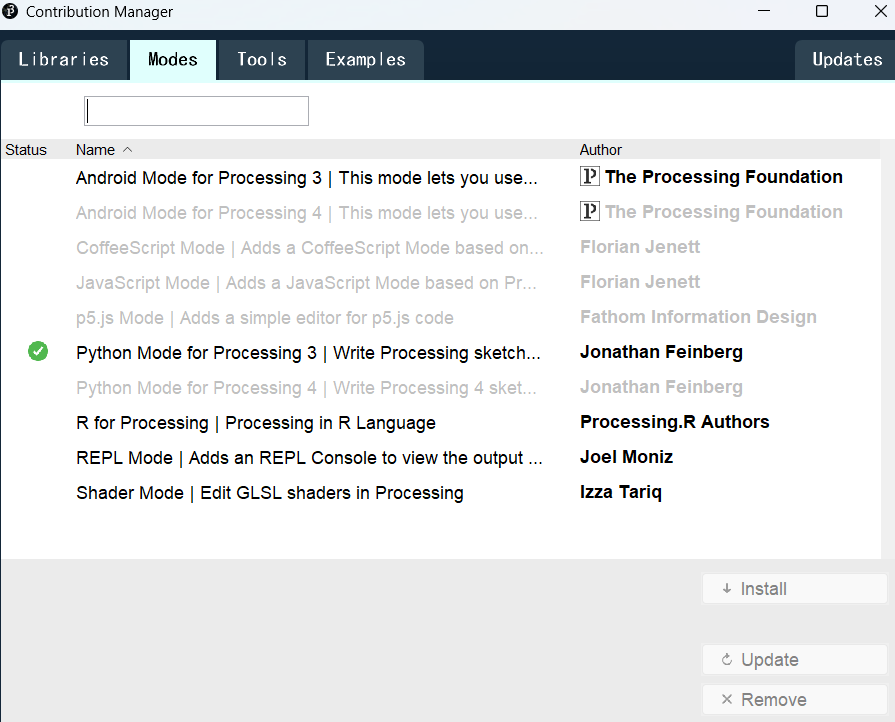
ProcessingでPythonを使うためには、Pythonモードがインストールされている必要があります。
Pythonモードが追加されていない場合、「ツール」→「ツールを追加」→「Modes」から「Python Mode for Processing 3」をインストールしてください。
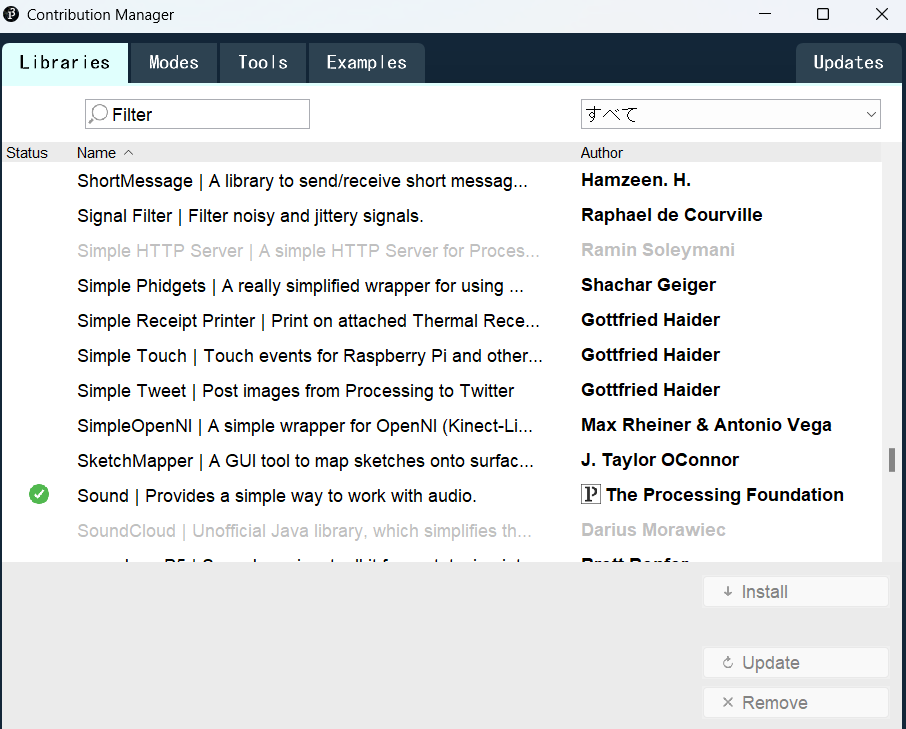
音を鳴らすには、Soundライブラリを追加する必要があります。
「ツール」→「ツールを追加」→「Libraries」から「Sound」をインストールしてください。
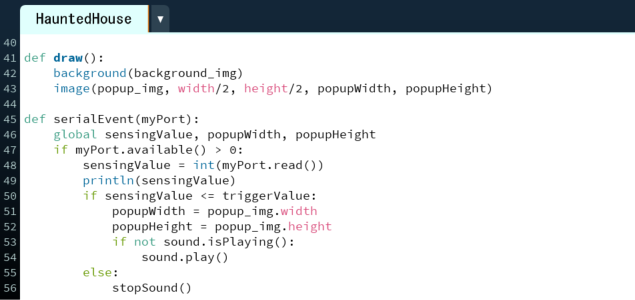
距離センサーの値が10以下になるとポップアップ画像(popup.png)が表示され、音が再生されます。
距離センサーの値が10を超えるとポップアップ画像が表示されなくなり、音が止まります。
※ 距離センサーの値10はプログラムの10行目で指定しているtriggerValueの値
ProcessingIDEのプログラムの15行目のplayModeを変更することで、ポップアップ画像の表示と音の再生のタイミングが変わります。
playModeが1の場合:
距離センサーの値が10以下になると、ポップアップ画像が表示され、音が再生されます。
距離センサーの値が10を超えるとポップアップ画像が表示されなくなり、音が止まります。
playModeが2の場合:
距離センサーの値が10以下になると、音が最後まで再生され、ポップアップ画像も表示されます。
音が再生されている間は、距離センサーの値が10を超えてもポップアップ画像は表示されます。
#include <SchooMyUtilities.h>
#include <OneWire.h>
#include <DallasTemperature.h>
#include <Wire.h>
SchooMyUtilities scmUtils = SchooMyUtilities();
/************ sensorTypeの種類 ************/
int sensorType = 9;
// 1: タッチセンサー
// 2: 明るさセンサー
// 3: 磁気センサー
// 4: 通過センサー(プッシュスイッチも可)
// 5: 音センサー
// 6: 土壌水分センサー
// 7: 温度センサー
// 8: 加速度センサー
// 9: 距離センサー
/************ 特定のセンサーで必要な関数 ************/
float _sbeGetLux(int pinNumber, int res, float vol) {
pinMode(pinNumber, INPUT);
float cds_ad = analogRead(pinNumber);
float cds_v = cds_ad * vol / res;
float v_res = vol - cds_v;
if (v_res < 0.01) {
v_res = 0.01;
}
return 10000 * cds_v / v_res / 1000;
}
unsigned long distanceTimeOut = 100000;
float _sbeGetDistanceUsingDistanceSensor(int trigPin, int echoPin) {
long distance = 0;
long duration = 0;
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH, distanceTimeOut);
if (duration > 0) {
distance = duration / 2 * 340 * 100 / 1000000;
}
return distance;
}
float _sbeGetValOfMoisture(int pinNumber) {
pinMode(pinNumber, INPUT);
float moisture_ad = analogRead(pinNumber);
return moisture_ad;
}
#define SENSOR_BIT 9
OneWire oneWire_19(19);
DallasTemperature sensors_19(&oneWire_19);
float _sbeGetTemperature_19() {
sensors_19.requestTemperatures();
return sensors_19.getTempCByIndex(0);
}
int MPU6050_ADDR = 0x68;
#define MPU6050_SMPLRT_DIV 0x19
#define MPU6050_CONFIG 0x1a
#define MPU6050_GYRO_CONFIG 0x1b
#define MPU6050_ACCEL_CONFIG 0x1c
#define MPU6050_PWR_MGMT_1 0x6b
int16_t raw_acc_x, raw_acc_y, raw_acc_z, raw_t, raw_gyro_x, raw_gyro_y, raw_gyro_z ;
float acc_x, acc_y, acc_z, acc_angle_x, acc_angle_y;
float absAccelerometer;
double gyro_angle_x = 0, gyro_angle_y = 0, gyro_angle_z = 0;
float interval, preInterval;
double offsetX = 0, offsetY = 0, offsetZ = 0;
float angleX, angleY, angleZ;
float dpsX, dpsY, dpsZ;
double init_angleX = 0, init_angleY = 0, init_angleZ = 0;
volatile float rel_angleX, rel_angleY, rel_angleZ;
void AcceleroMeterWireRead() {
Wire.beginTransmission(MPU6050_ADDR);
Wire.write(0x6B);
Wire.write(0);
Wire.endTransmission(true);
Wire.beginTransmission(MPU6050_ADDR);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU6050_ADDR, 14, true);
raw_acc_x = Wire.read() << 8 | Wire.read();
raw_acc_y = Wire.read() << 8 | Wire.read();
raw_acc_z = Wire.read() << 8 | Wire.read();
raw_t = Wire.read() << 8 | Wire.read();
raw_gyro_x = Wire.read() << 8 | Wire.read();
raw_gyro_y = Wire.read() << 8 | Wire.read();
raw_gyro_z = Wire.read() << 8 | Wire.read();
}
void AcceleroMeterAddressSetup() {
byte error, address;
int nDevices = 0;
for(address = 1; address < 127; address++ ) {
Wire.beginTransmission(address);
error = Wire.endTransmission();
if (error == 0) {
if (address<16)MPU6050_ADDR = address;
nDevices++;
}
}
}
void writeMPU6050(byte reg, byte data) {
Wire.beginTransmission(MPU6050_ADDR);
Wire.write(reg);
Wire.write(data);
Wire.endTransmission();
}
void AcceleroMeterAngleSetup() {
AcceleroMeterAddressSetup();
AcceleroMeterWireRead();
writeMPU6050(MPU6050_SMPLRT_DIV, 0x00);
writeMPU6050(MPU6050_CONFIG, 0x00);
writeMPU6050(MPU6050_GYRO_CONFIG, 0x08);
writeMPU6050(MPU6050_ACCEL_CONFIG, 0x00);
writeMPU6050(MPU6050_PWR_MGMT_1, 0x01);
Serial.print("Calculate Calibration");
for (int i = 0; i < 3000; i++) {
AcceleroMeterWireRead();
dpsX = ((float)raw_gyro_x) / 65.5;
dpsY = ((float)raw_gyro_y) / 65.5;
dpsZ = ((float)raw_gyro_z) / 65.5;
offsetX += dpsX;
offsetY += dpsY;
offsetZ += dpsZ;
if (i % 1000 == 0) {
Serial.print(".");
}
}
Serial.println();
offsetX /= 3000;
offsetY /= 3000;
offsetZ /= 3000;
Serial.print("Calculate Rotation");
for (int i = 0; i < 1000; i++) {
calcRotation();
if (i % 1000 == 0) {
Serial.print(".");
}
}
Serial.println();
init_angleX = angleX;
init_angleY = angleY;
init_angleZ = angleZ;
}
void calcRotation() {
acc_x = ((float)raw_acc_x) / 16384.0;
acc_y = ((float)raw_acc_y) / 16384.0;
acc_z = ((float)raw_acc_z) / 16384.0;
acc_angle_y = atan2(acc_x, acc_z + abs(acc_y)) * 360 / -2.0 / PI;
acc_angle_x = atan2(acc_y, acc_z + abs(acc_x)) * 360 / 2.0 / PI;
dpsX = ((float)raw_gyro_x) / 65.5;
dpsY = ((float)raw_gyro_y) / 65.5;
dpsZ = ((float)raw_gyro_z) / 65.5;
interval = millis() - preInterval;
preInterval = millis();
gyro_angle_x += (dpsX - offsetX) * (interval * 0.001);
gyro_angle_y += (dpsY - offsetY) * (interval * 0.001);
gyro_angle_z += (dpsZ - offsetZ) * (interval * 0.001);
angleX = (0.996 * gyro_angle_x) + (0.004 * acc_angle_x);
angleY = (0.996 * gyro_angle_y) + (0.004 * acc_angle_y);
angleZ = gyro_angle_z;
gyro_angle_x = angleX;
gyro_angle_y = angleY;
gyro_angle_z = angleZ;
rel_angleX = init_angleX - angleX;
rel_angleY = init_angleY - angleY;
rel_angleZ = init_angleZ - angleZ;
}
float relativeAngleX() {
AcceleroMeterWireRead();
calcRotation();
return rel_angleX;
}
/***************************************************************/
/************ 各センサーの関数 ************/
void touchSensor() {
Serial.write(digitalRead(19));
}
void brightnessSensor() {
Serial.write(int(_sbeGetLux(A5, 1023, 5)));
}
void magneticSensor() {
Serial.write(analogRead(A5));
}
void passingSensor() {
Serial.write(!digitalRead(19));
}
void soundSensor() {
scmUtils.soundSensorBegin(A5);
Serial.write(scmUtils.soundSensorPlotterAnalogRead(A5));
}
void soilMoistureSensor() {
Serial.write(int(_sbeGetValOfMoisture(A5)));
}
void temperatureSensor() {
sensors_19.setResolution(SENSOR_BIT);
Serial.write(int(_sbeGetTemperature_19()));
}
void accelerationSensor() {
Serial.write(int(relativeAngleX()));
}
void distanceSensor() {
Serial.write((byte)_sbeGetDistanceUsingDistanceSensor(18 , 19));
}
/***************************************************************/
void changeSensorType(int type) {
switch(type) {
case 1:
touchSensor();
break;
case 2:
brightnessSensor();
break;
case 3:
magneticSensor();
break;
case 4:
passingSensor();
break;
case 5:
soundSensor();
break;
case 6:
soilMoistureSensor();
break;
case 7:
temperatureSensor();
break;
case 8:
accelerationSensor();
break;
case 9:
distanceSensor();
break;
}
}
void setup() {
Serial.begin(9600);
pinMode(19, INPUT);
if(sensorType==8){
Wire.begin();
AcceleroMeterAngleSetup();
}
}
void loop() {
changeSensorType(sensorType);
}
add_library('serial')
add_library('sound')
myPort = None
available_serialport = 2
arduinoPort = Serial.list()[available_serialport]
popupWidth = 0
popupHeight = 0
sensingValue = 0
triggerValue = 10
popup_img = "haunted_house_popup.png"
background_img = "haunted_house_background.png"
sound_file = "haunted_house_sound.mp3"
playMode = 1
# 1: Interrupt sound playback
# 2: Play sound until the end
def stopSound():
global popupWidth, popupHeight
if playMode == 1:
popupWidth = 0
popupHeight = 0
if sound.isPlaying():
sound.stop()
elif playMode == 2:
if not sound.isPlaying():
popupWidth = 0
popupHeight = 0
def setup():
global myPort, popup_img, background_img, sound
popup_img = loadImage(popup_img)
background_img = loadImage(background_img)
this.surface.setSize(background_img.width, background_img.height)
myPort = Serial(this, arduinoPort, 9600)
imageMode(CENTER)
sound = SoundFile(this, sound_file)
def draw():
background(background_img)
image(popup_img, width/2, height/2, popupWidth, popupHeight)
def serialEvent(myPort):
global sensingValue, popupWidth, popupHeight
if myPort.available() > 0:
sensingValue = int(myPort.read())
println(sensingValue)
if sensingValue <= triggerValue:
popupWidth = popup_img.width
popupHeight = popup_img.height
if not sound.isPlaying():
sound.play()
else:
stopSound()
このページのHelloNoは、050011 です!