ホワイト先生
サーボモーターコネクターを使うときに使います
目次
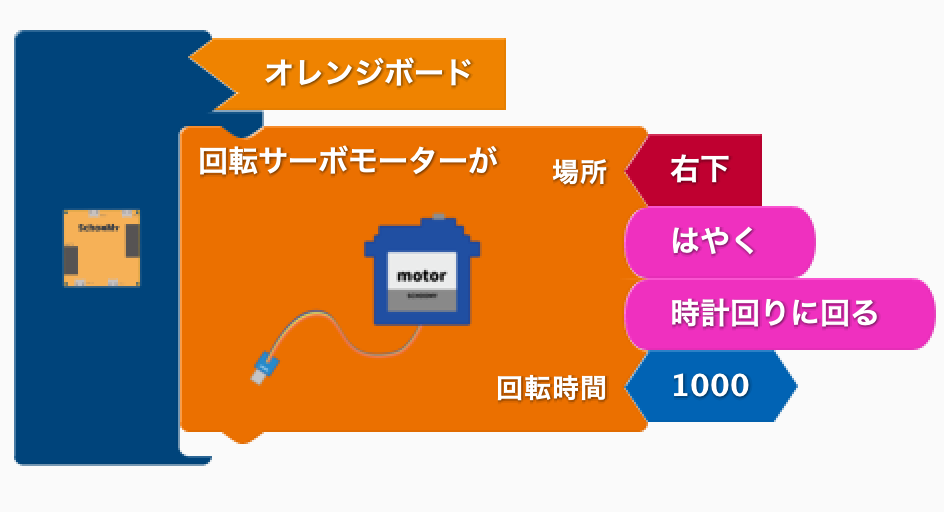
サーボモーターをはやく時計回りにまわそう
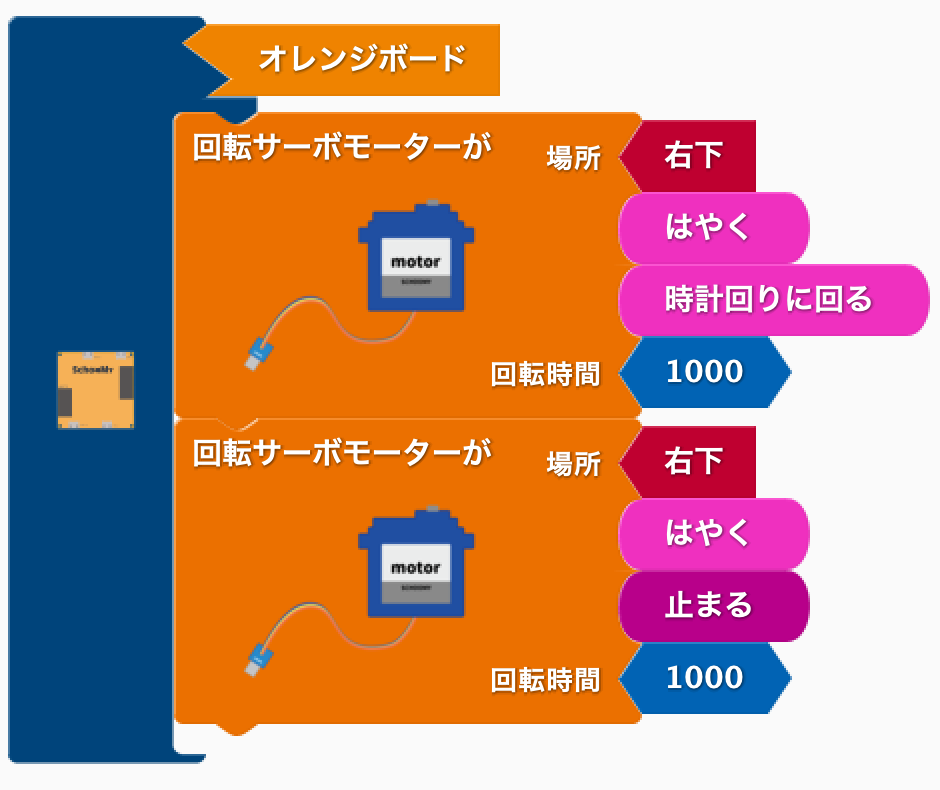
1秒回って、1秒止まらせよう
振り子の動きを作ってみよう
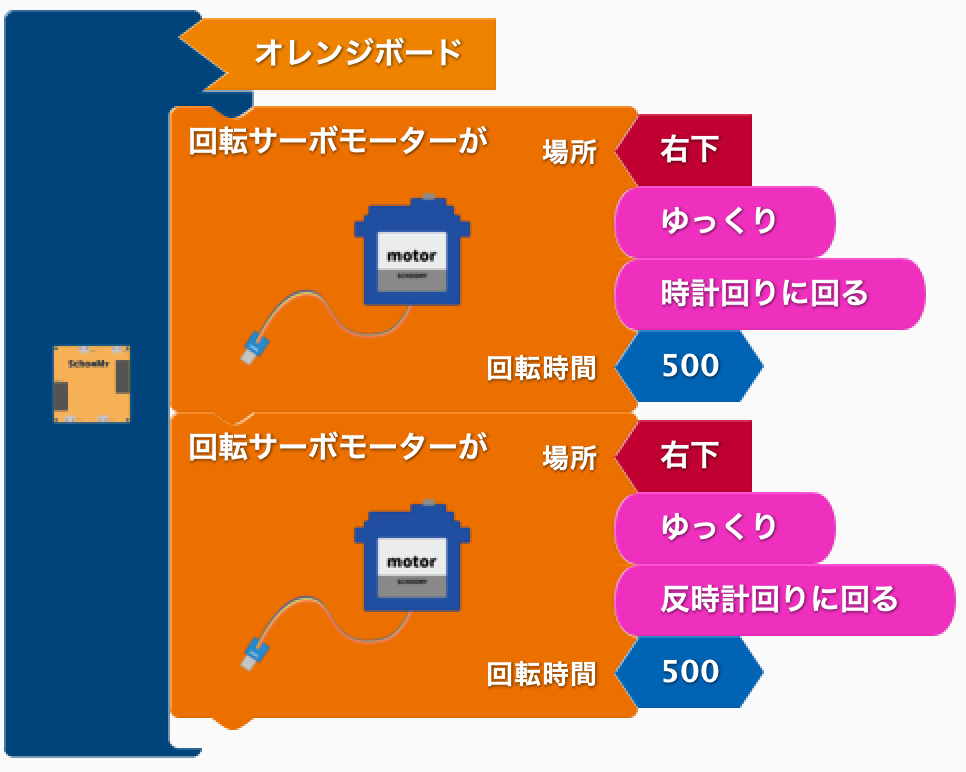
1秒ごとに時計回り⇒止まる⇒反時計回り⇒止まる をくりかえそう

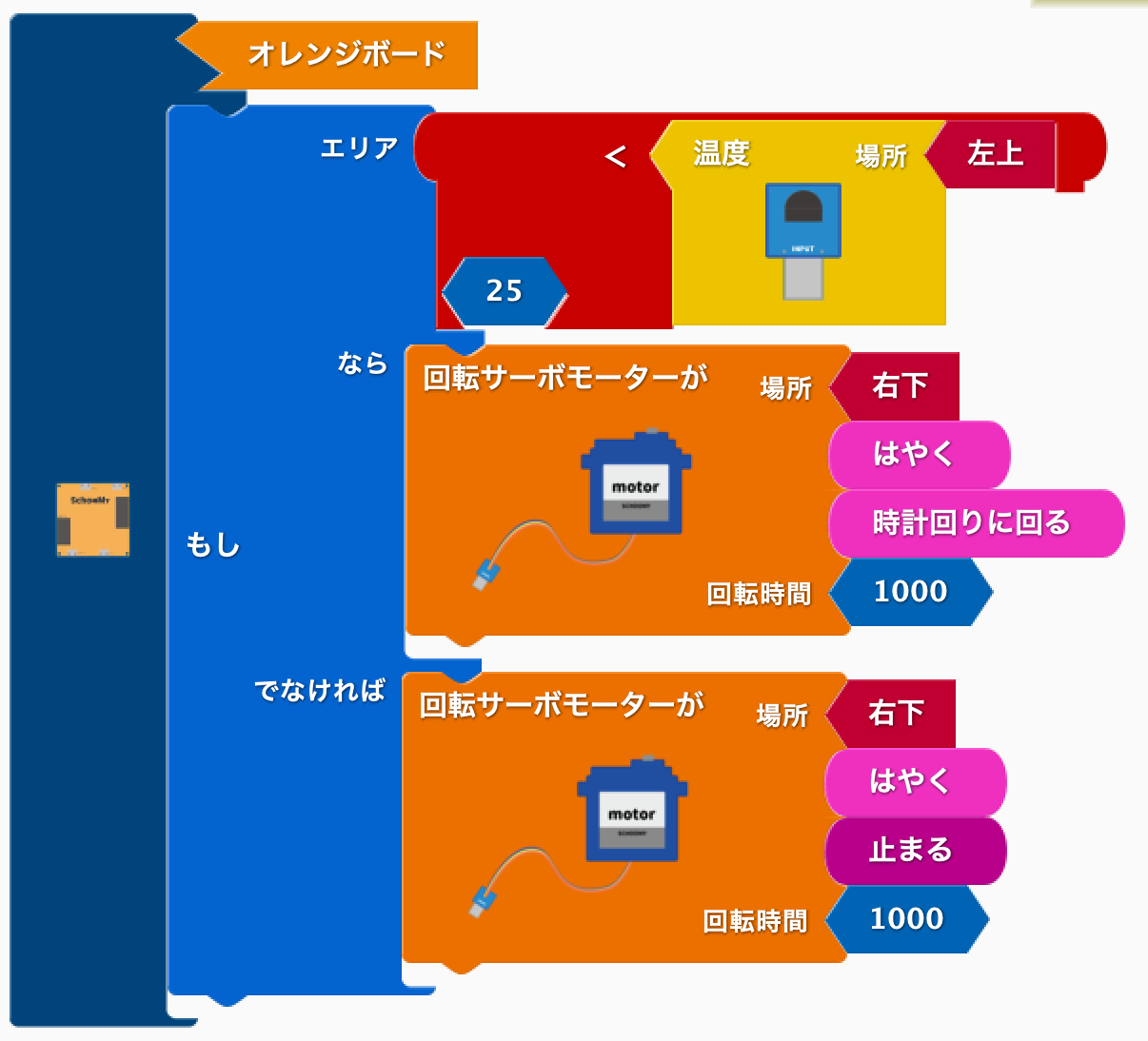
温度が25度より大きくなったらサーボモーターを時計回りに回転させよう(温度感知扇風機)
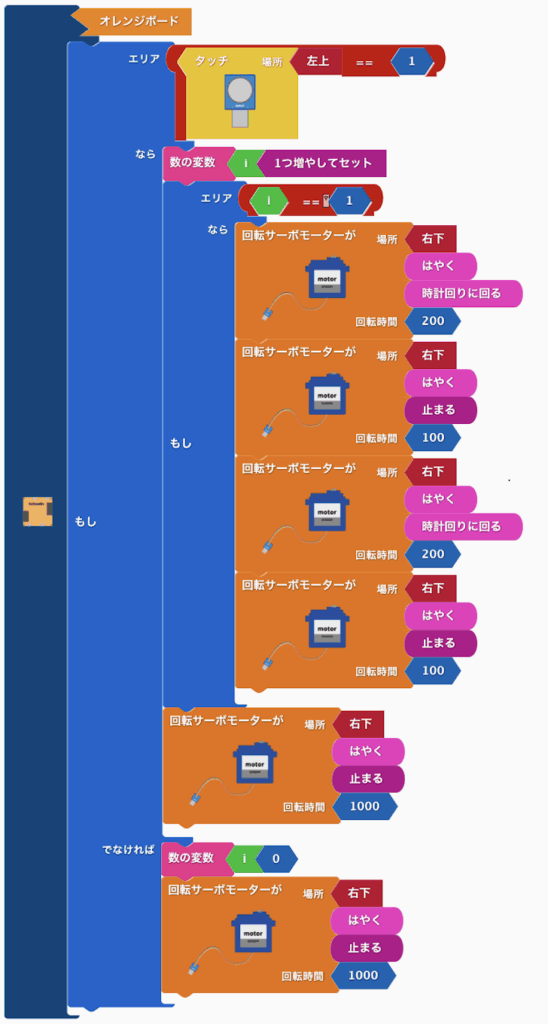
タッチコネクターにふれたら、セットした紙飛行機が飛ぶセンサーを作ろう
スペック
- トルク: 0.147Nm(4.8V時)
- 回転速度: 130RPM(6V時)、100RPM(4.8V時)
- 動作電圧: 4.8V ~ 6V
キャロット
このページのHelloNoは、030205 です!